Immer wenn ich einen Beitrag zum Mikrocontroller (wenn der eine größere Last schalten muss) schreibe, kommen Anfragen zum ‚womit und wie?‘. Im Prinzip bediene ich mich aber immer der gleichen Schaltung, nur mit angepassten Bauteilen.
Immer wenn ich einen Beitrag zum Mikrocontroller (wenn der eine größere Last schalten muss) schreibe, kommen Anfragen zum ‚womit und wie?‘. Im Prinzip bediene ich mich aber immer der gleichen Schaltung, nur mit angepassten Bauteilen.
Die meisten Controller arbeiten irgendwo zwischen 2,5 und 5V. Pro Pin sind meist weniger als 20mA maximaler Strom möglich, induktive Lasten sind auch so eine Sache. Wird ein ganzer Port benutzt, kann es noch enger sein. Meist kann dieser, i. d. R. 8 Ausgänge, nur mit max. 40mA belastet werden, diese müssen auf die einzelnen Pins verteilt werden. Einige LEDs kann man so vielleicht noch direkt über einen Vorwiderstand ansteuern, spätestens bei Motoren oder zahlreicheren Leuchtdioden ist aber Schluss. Hilft also alles nichts, es muss ein Verstärker eingesetzt werden, im einfachsten Fall ein Transistor. Um es nicht unnötig kompliziert zu gestalten halte ich mich in diesem Beitrag an die einfachsten Formen, sicherlich sind noch etliche Verfeinerungen möglich.
Hier und hier habe ich ja schon ein paar Worte zum Transistor auf das virtuelle Papier gebracht, die dort beschriebenen Vorgänge sind Grundvoraussetzung zum Einsetzen der folgenden Schaltungsform.
Ich nehme mal folgendes als gegeben an:
- Betriebsspannung 12V DC.
- zu versorgender 12V / 0,5A Motor, nur in eine Richtung laufend.
- Ein beliebiger Mikrocontroller, der mit 5V versorgt wird, welche angenommen bereits vorhanden sind.
- Maximaler Ausgangsstrom des Controller 20mA.
- Ein NPN-Transistor mit B=100 und max. 1,5A Belastbarkeit (BD139 o. ä.).
Realisiert werden soll eine Schaltung, die bei einem ‚H‘-Pegel am Kontrollerausgang den Motor startet, bei ‚L‘ soll er eben einfach wieder stehen bleiben.
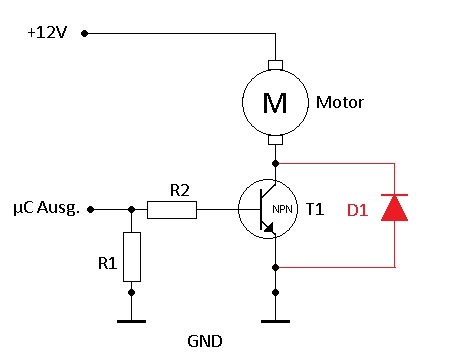
 Im Bild die Prinzipschaltung.
Im Bild die Prinzipschaltung.
+12V zum Motor, diese werden bei ‚H‘ am Controllerausgang (und somit der Basis des Tranistors) über den Motor nach GND durchgeschaltet – der Motor dreht sich. Die Freilaufdiode (rot) dient dazu, induzierte Spannungen vom Motor kurzzuschließen. Bei rein ohmschen Lasten wie LEDs oder ähnlichem braucht man sie nicht. Es genügt in diesem Falle übrigens eine Standard 1N400X oder ähnliches, bei höheren Strömen/Spannungen/Frequenzen kann etwas spezielleres erforderlich werden.
Besonderes Augenmerk liegt auf R1 bzw. R2.
R1
Ich habe die Erfahrung gemacht, dass es Umstände gibt, unter denen es besser ist, die Basis eines Transistors sicher auf Masse bzw. GND zu legen. Der Wert ist nicht kritisch, es soll ja auch nicht unnötig viel Strom vom Controller geliefert werden müssen. Es geht eben darum, das im ‚L‘-Zustand des Controllerausganges die Basis vom Transistor auf GND liegt damit er nicht durchschalten kann. Im Alltagsgebrauch bin ich mit 10-100k gut ausgekommen.
R2
Sein Wert ist abhängig vom B (Verstärkungsfaktor) des Transistors. Ist ‚B‘ im Datenblatt nicht zu finden, auch mal nach ‚hFE‘ sehen. Sinnvollerweise sollte der Transistor so weit aufgesteuert werden wie möglich. Man möchte ja die Energie optimal im Motor umsetzen, nicht in der Schaltung. Ausgehend von +5V am Controllerausgang bei „H“ und einer UBE von 0,7V stehen 4,3V an der Basis des Transitors zur Verfügung. Der Motor will 500mA an Strom, dies ist also das Minimum, was fließen soll. Es wäre allerdings Unsinn, jetzt den Stromfluss auf den Motorstrom zu begrenzen, die Spannung UCE würde ja auch wieder unnötig ansteigen und der Motor als Verbraucher bestimmt in diesem Fall sowieso den maximalen Strom. Um nun den minimalen Basisstrom zu errechnen, muss der Strom den der Controller liefern soll mit dem Verstärkungsfaktor multipliziert werden.
Soll also heißen:
Ich will min. 500mA für den Motor, besser ohne Begrenzung.
Der Transistor verstärkt x100, also müssen min. 5mA vom Controller kommen.
U=R*I -> die oben errechneten 4,3V / 5mA = 860 Ohm
Die ist also der maximale Wert, den der Widerstand R1 haben darf. Da aber der Transistor voll offen sein soll, muss der Basistrom noch höher sein. In diesem Falle spricht man im Allgemeinen vom Übersteuern, es wird mehr Basisstrom zugeführt, als für ein komplettes öffnen nötig wäre, z. B. +200%, also das Doppelte. Hier ist ein Blick ins Datenblatt des Transistors unerlässlich! Einmal für den Verstärkungsfaktor, zum anderen für den maximal zulässigen Basisstrom, ruinieren will man das Bauteil ja auch nicht. In der Praxis nehme ich immer einen Wert zwischen 220 und 470 Ohm, hat bisher funktioniert. Wichtig ist auch, dass der Transistor bei Übersteuerung langsamer wird. Das kann man aber getrost vernachlässigen, wenn man sich nicht im MHz Bereich bewegt. Bei allem, was das Auge erfassen kann allemal.
Ist (bei kleineren Strömen) der maximale Stromfluss erreicht, kann es sogar möglich sein, den Transistor ohne zusätzliche Kühlung zu betreiben. Bei den Universaltypen liegt die UCE übersteuert so um die 300mV. Fließen nun wirklich nur 500mA Motorstrom, sind das nach P=U*I 500mA*300mV= 150mW.
Dieser Schaltungstyp (Open Collector) eignet sich für sehr viele Anwendungen, in denen mit kleinem Steuersignal eine größere Last geschaltet werden soll. Man kann das ganze noch verbessern, indem statt des Transistors ein FET eingesetzt wird oder mit einer Brückenschaltung auch eine Umpolung ermöglicht oder ein Special-IC einsetzt oder, oder, oder… Die Frage ist einfach, wie viel Aufwand man für ein bestimmtes Ziel treiben möchte. Um ein paar LEDs blinken zu lassen, würde ich so simpel wie möglich planen, wenn Geschwindigkeit oder Präzision gefragt ist, entsprechend aufwändiger.
Fazit:
So ganz einfach kann ich das alles auch nicht beschreiben. Aber wenn man sich in den üblichen Hobbyanwendungen bewegt, führen ein BD139 oder BC548 (bei kleinen Strömen), R1=10k, R2=220 Ohm und bei Motoren eine 1N4007 als Freilaufdiode eigentlich immer zum Ziel. Bezogen auf 5V am Controller und 12V Versorgungsspannung für die Last. Evtl. möchte ein Motor auch noch einen Kondensator an seinen Anschlüssen sehen. Sollen LEDs angesteuert werden, die entsprechenden Vorwiderstände nicht vergessen, wie überhaupt natürlich darauf achten, dass Bauteile immer innerhalb ihrer Spezifikationen eingesetzt werden. Und wie immer VORSICHT bei elektrischen Basteleien bzw. wenn man experimentiert! ;.-)